История шестиногого монстра, созданного для армии США

В начале сентября ВВС США отчитались об испытании четвероногого «робота-собаки». До этого широкую известность приобрели «гражданские» зооморфные механизмы от Boston Dynamics. На самом деле американские военные уже давно пытаются создать шагающего робота. Недавно американское сетевое издание The Drive напомнило читателям о впечатляющем проекте из 1980-х годов — гигантской шагающей машине, напоминающей технику из «Звездных войн».
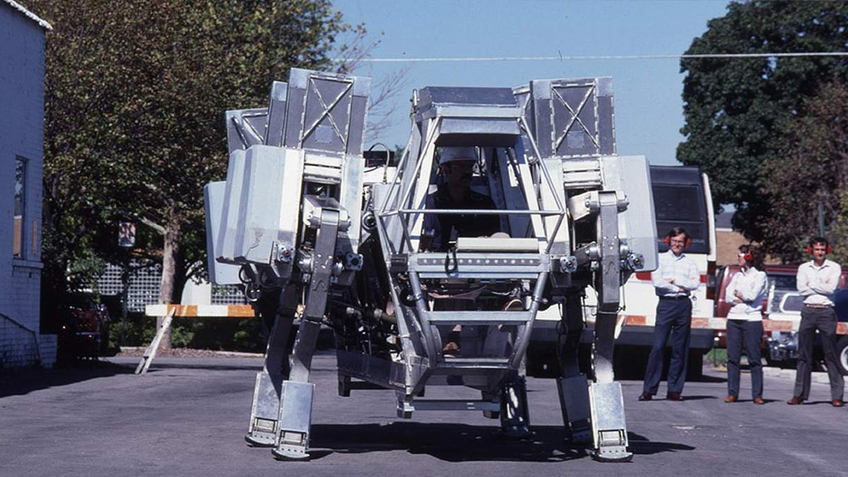
Американская армия любит свои игрушки и платит за них большие деньги. Поэтому она, естественно, разочаровывается, когда не может доставить свои дорогие гаджеты туда, куда хочет. В 1980-х годах Вооруженные силы США подсчитали, что примерно половина суши на планете непроходима для обычных колесных или гусеничных машин, то есть почти для всего их наземного транспорта. Это явно было проблемой, поэтому руководство армии США начало сотрудничество с Университетом штата Огайо (OSU) и несколькими внешними подрядчиками для разработки адаптивного подвесного транспортного средства: шестиногого гидравлического робота размером с грузовик, управляемого одним оператором.
Хотя механизм был очень сложным и крайне медлительным, это была успешная попытка перенести неестественную технику движений ног со страниц научной фантастики в реальность, опередившая жуткую механизированную игру в животных компании Boston Dynamics на добрых два десятилетия.
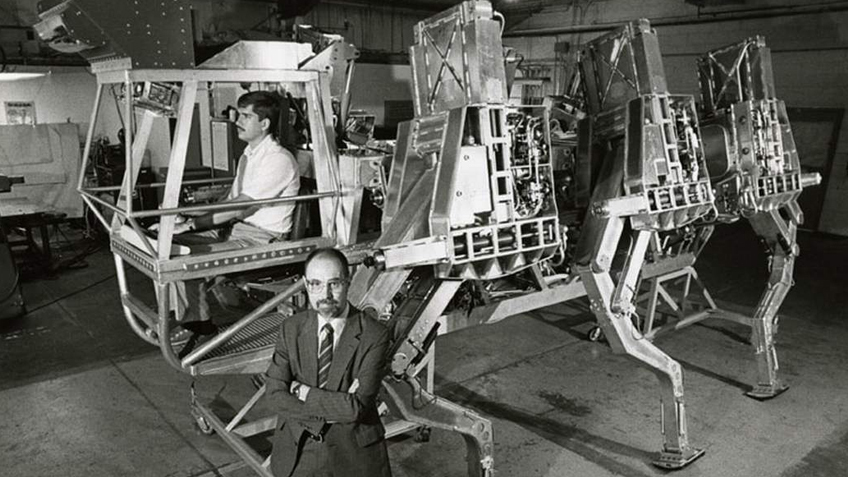
Проект ASV, финансируемый Управлением перспективных исследовательских проектов министерства обороны США (DARPA), стартовал в OSU в январе 1981 года. В течение последующих девяти лет механизм разрабатывался под руководством профессоров университета Роберта Макги и Кеннета Уолдрона. В отличие от других, более грубых экспериментов, которые проводились до этого, новое транспортное средство контролировалось с помощью 17 компьютеров, что облегчало физическую и умственную нагрузку на водителя, вынужденного в ежедневном режиме управлять шестью ногами ASV.
Эти компьютеры, разумеется, были невероятно слабыми по сегодняшним стандартам. Массивные прямоугольные коробки, которые вы видите над металлическими выступами автомобиля, не являются каким-то гидравлическим резервуаром — в каждом из них находится один из шести 8-битных компьютеров Intel, ответственных за перемещение ног.
Остальные 11 штук выполняли другие различные задачи, такие как управление электронно-лучевыми мониторами внутри кабины, анализ всех данных, собранных с ног и датчиков давления, определение наилучшей опоры для машины на основе данных сканирующего дальномера (128 x 128 пикселей), установленного над кабиной. Чтобы машина ASV могла успешно двигаться вперед, все эти данные постоянно интерпретировались операционным программным обеспечением автомобиля, написанным на языке Pascal и состоящим из 150 000 строк исходного кода.
На этом заканчивается автоматика и начинаются механические и человеческие составляющие. Транспортное средство характеризуется скорее как контролируемое, нежели управляемое. Оператор задает автомобилю ASV маршрут с помощью клавиатуры и джойстика, а затем шестиногий монстр сам отправляется в указанном направлении. Согласно некоторым источникам, конечной целью проекта было сделать эту машину автономной. Однако команда OSU была явно ограничена вычислительной мощностью компьютеров того времени, несмотря на то что проект регулярно финансировался и они получали по миллиону долларов от DARPA каждый год.
Конечно же, не все деньги шли на компьютеры, потому что механические системы, приводящие ASV в движение, были также очень сложными. В основе машины был двигатель мотоцикла 900cc с максимальной мощностью 91 л. с., но он не просто приводил в действие один массивный гидравлический насос. Между двигателем и 18 насосами с переменным рабочим объемом — да, 18 гидроцилиндрами, приводящими в движение автомобиль, — располагался супермаховик весом 45 кг. Он вращался, делая до 12 000 оборотов в минуту, и мог запасать 25 кВт∙ч энергии. Это означает, что он мог выдавать мощность в 250 Вт (около одной трети лошадиной силы) в течение одного часа и даже гораздо большее количество энергии в более короткий промежуток времени.
Это было полезно, потому что 18 насосов ASV приводились в действие довольно сложной системой. Двигатель передавал мощность от выходного вала к трем отдельным карданным валам с помощью зубчатых приводных ремней. Они шли по всей длине транспортного средства, которое, в свою очередь, передавало энергию насосам через еще более зубчатые приводные ремни. Для выполнения высокоэнергетических маневров в этой системе с высоким коэффициентом трения автомобилю требовалось больше энергии, чем мог произвести двигатель. Как раз для этого использовалась энергия, хранящаяся в маховике. Маховик также позволял машине возместить некоторую энергию за счет насосов, когда ASV останавливался (подобно регенеративной тормозной системе в гибридном автомобиле) и обеспечивал плавное выключение в случае внезапной потери мощности.
Благодаря этой сложной системе привода автомобиль мог двигаться с максимальной скоростью 8 миль в час (чуть меньше 13 км/ч) — говорят, при таком темпе езда была довольно резкой
Обычная скорость составляла 4 мили в час (около 6,5 км/ч). Машина могла делать больше, чем просто ходить и бегать. У нее было шесть различных режимов движения, в том числе служебная программа (диагностический режим), точная установка ног, маневрирование в замкнутом пространстве, следование за лидером, учет ландшафта местности и круиз-бросок.
Тем не менее низкая крейсерская скорость ограничивала применение ASV. Предельная скорость диктовалась не только количеством толчков, с которыми мог справиться оператор, но и его весом. Тяжелая машина весом 2,7 т могла перевозить устойчивый груз не тяжелее 220 кг, что считается недостаточным. Такой крупный автомобиль — более 5 м в длину, 2,4 м в ширину и 3 м в высоту — имел слишком маленькую грузоподъемность. Поэтому, несмотря на способность ASV перешагивать через вертикальные препятствия высотой около 2 м и пересекать траншеи шириной до 7 м, военные постепенно потеряли к нему интерес и программа была свернута в 1990 году.
Возможно, вы хотите отправиться в погоню за «дикими гусями» и выяснить текущее местонахождение этой машины? Источники указывают, что оно неизвестно. Есть предположение, что автомобиль до сих пор хранится где-нибудь в Университете штата Огайо, однако точных данных нет. Все, что мы можем делать, — просто восхищаться этой массивной машиной, неуклюже передвигающейся на своих шести насекомоподобных ногах. Таким компаниям, как Boston Dynamics, потребовалось много времени, чтобы передвижение на ногах стало реальностью для машин, но даже эти машины все еще не перевозят людей. Автору этой статьи хотелось бы оседлать и прокатиться на одном из ее роботов — «больших собак». А вам?