























Австралийские инженеры создали рой роботов для добычи руды

Австралийские исследователи из Университета Аделаиды создали систему ройной робототехники, вдохновленную поведением пчел и муравьев. Как показало исследование, опубликованное в журнале Natural Sciences, такой подход может сделать добычу полезных ископаемых безопаснее, дешевле и эффективнее, особенно в труднодоступных районах, где традиционные методы автоматизации сталкиваются с ограничениями.
Что подсказала природа
Современные горнодобывающие компании все чаще работают на больших глубинах и в удаленных регионах. Для таких условий активно разрабатываются автоматизированные системы, однако они обычно зависят от центрального компьютера. Если такой управляющий узел выходит из строя, работа может остановиться.
Команда ученых решила поискать решение в природе. Муравьи и пчелы способны координировать действия тысяч особей без единого руководящего центра. Каждый участник выполняет относительно простые задачи, но вместе они формируют удивительно эффективную систему.
Исследователи попытались перенести этот принцип в робототехнику.
Три стратегии для одной шахты
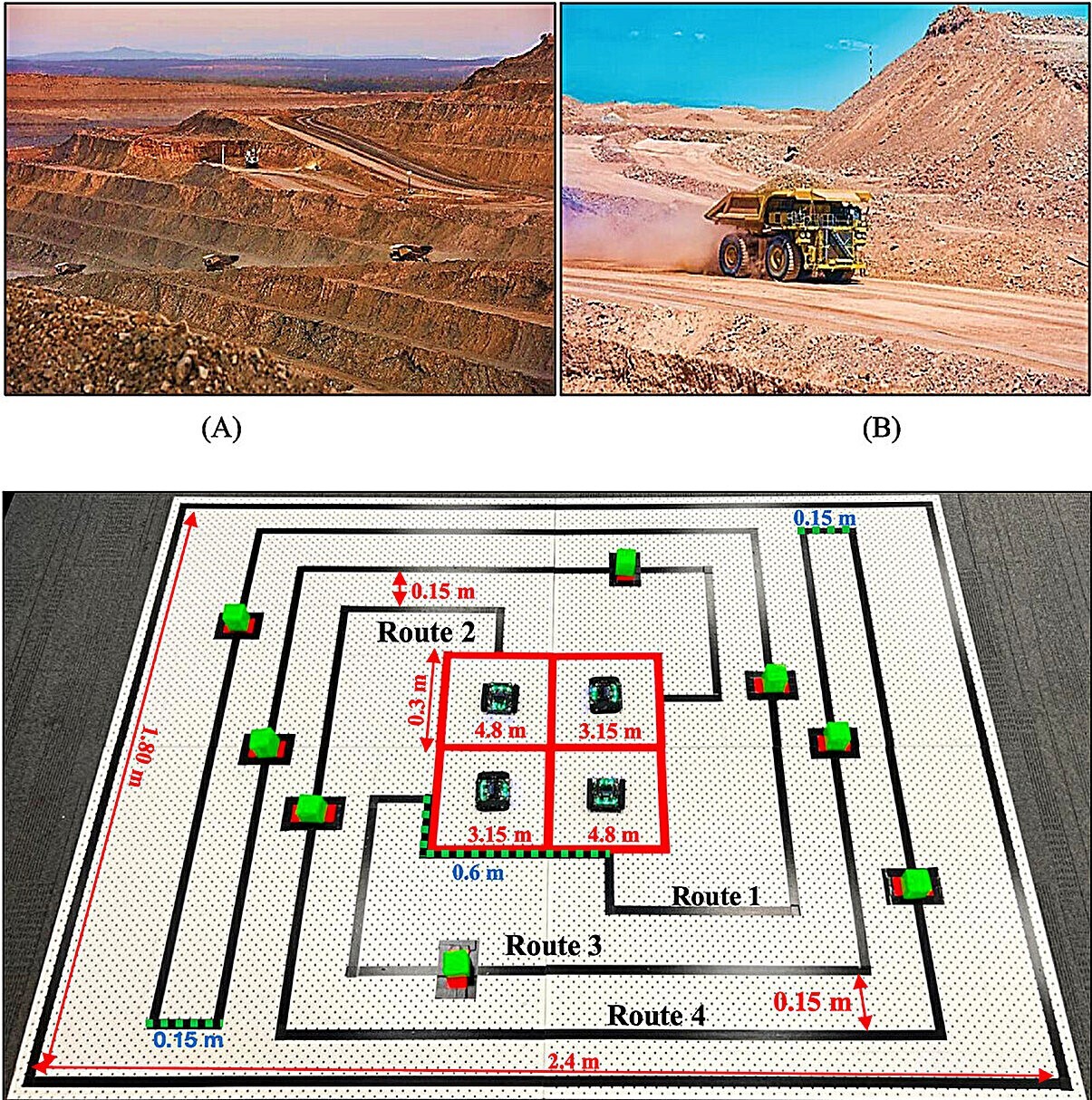
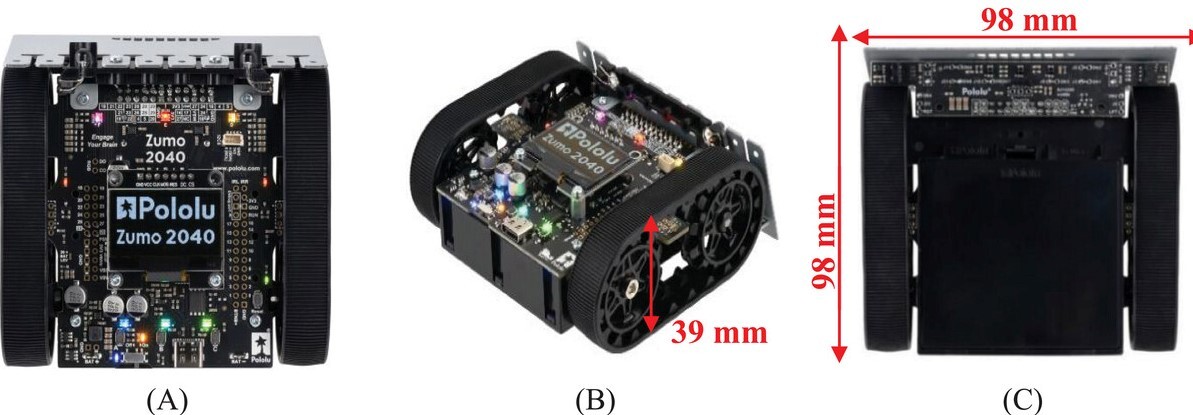
Для эксперимента использовали небольших роботов Zumo 2040 и лабораторный полигон, имитирующий условия шахты.
Ученые сравнили три варианта работы. В первом случае роботы просто находили руду и сразу доставляли ее на базу. Во втором применялся подход, вдохновленный муравьями, когда разные машины разделяли обязанности между собой. Одни занимались поиском ресурсов, другие их перевозкой.
Третья стратегия копировала поведение пчел. Сначала роботы исследовали территорию и создавали карту местности, запоминая расположение ресурсов, а уже затем приступали к их сбору и транспортировке.
При этом вся система работала без центрального управляющего компьютера. Каждый робот самостоятельно принимал решения и координировал действия с другими участниками роя.
Такой подход делает систему устойчивой к отказам. Даже если часть машин выходит из строя, остальные продолжают выполнять задачу.
Пчелы оказались лучшими учителями
Наиболее успешной оказалась именно «пчелиная» стратегия.
Предварительное изучение территории позволило роботам существенно сократить количество лишних перемещений. В результате пройденное расстояние уменьшилось почти на 80%, энергопотребление снизилось примерно вдвое, а доставка руды выполнялась до 60% быстрее по сравнению с базовой схемой работы.
Подход, вдохновленный муравьями, также улучшил показатели, но уступил варианту с предварительным картографированием местности.
«Социальные насекомые разработали очень эффективные способы совместного решения проблем, — отметил ведущий автор исследования доктор Джовен Тан. — Применив эти идеи к робототехнике, мы сможем создать системы, которые будут более эффективными, адаптируемыми и надежными для таких отраслей, как горнодобывающая промышленность».
Испытания вышли за пределы компьютерной модели
Авторы подчеркивают, что работа не ограничилась симуляциями. Все алгоритмы были протестированы на реальных роботах в лабораторных условиях, приближенных к добыче полезных ископаемых.
По словам руководителя проекта доктора Нуне Мелкумян, это показывает, что идеи, подсмотренные у живой природы, можно успешно превращать в практические технологии.
«Природа миллионы лет разрабатывала эффективные способы взаимодействия групп животных. Изучая эти системы, мы можем разрабатывать новые технологии, которые будут более гибкими, надежными и эффективными», — сказала исследовательница.
Перспективы под землей и в космосе
До внедрения технологии в настоящих шахтах предстоит решить ряд задач. Инженерам необходимо повысить надежность датчиков, увеличить время автономной работы и адаптировать роботов к непредсказуемым подземным условиям.
Тем не менее потенциальные возможности выглядят весьма широкими. Рой роботов может работать в опасных зонах, где присутствие человека связано с повышенным риском. Кроме того, подобные системы рассматриваются как один из возможных инструментов для будущей добычи ресурсов на Луне или астероидах.
«Роевая робототехника — это уже не просто теоретическая идея, — подчеркнула Мелкумян. — Такие системы можно создавать, тестировать и использовать в реальных условиях. В будущем они способны изменить способы разведки, добычи и транспортировки ресурсов».