























Для летающих роботов сделали крылья, как у колибри, с датчиками ветра — видео

В Токийском институте науки разработали метод определения направления ветра с точностью свыше 99% при помощи всего семи датчиков на машущем крыле. Вдохновленная природой технология может стать прорывом в создании летающих роботов.
Крылья летающих насекомых и птиц снабжены механическими рецепторами, которые собирают данные о натяжении. Они воспринимают изменения ветра, движения тела и условий окружающей среды, помогая контролировать полет.
Команда исследователей лаборатории биомиметики воздушных/водных сред решила адаптировать подобную систему к применению на летающих роботах.
«Небольшие воздушные роботы не могут позволить себе использовать традиционную аппаратуру для измерения потока из-за серьезных ограничений по весу и размеру. Поэтому было бы полезно, если бы можно было использовать простое измерение деформации крыла для непосредственного распознавания условий потока без дополнительных специализированных устройств», — объясняет доцент Хирото Танака.
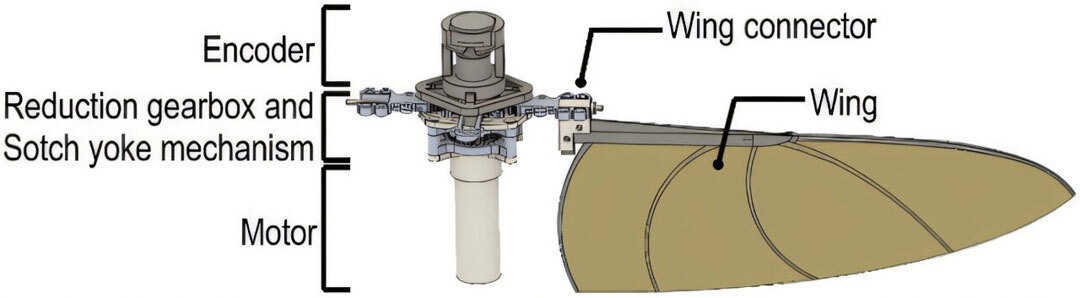
Ученые построили модель гибкого крыла. На нем закрепили семь тензодатчиков и испытали в аэродинамической трубе, сымитировав взмахи крыльев колибри, зависшего в воздухе при слабом ветре. Результаты опытов опубликованы в журнале Advanced Intelligent Systems.
Крыло приводили в движение двигателем через редукторы, чтобы оно производило 12 взмахов в секунду, и обдували потоком воздуха со скоростью 0,8 м/с с разных сторон, моделируя семь направлений ветра, а также штиль. Данные деформации крыла обрабатывались сверточной нейросетью.
Достигнута превосходная точность определения ветра 99,5% с использованием данных о деформации за полный цикл взмаха. Укорочение данных до 0,2 от цикла, удаление ребер жесткости из модели, отключение части тензодатчиков снижало точность, но все равно она оставалась достаточно высокой.
«Парящие птицы и насекомые могут чувствовать ветер посредством определения деформации своих крыльев, что полезно для гибкого управления полетом. Подобную систему можно реализовать в биомиметических воздушных роботах с машущими крыльями с использованием простых тензодатчиков», — заключил Танака.




