























Создана роботизированная рука для работы с образцами в космосе

По данным Европейского космического агентства European Space Agency, инженеры завершают сборку манипулятора Sample Transfer Arm (STA) — системы для работы с объектами в условиях дальнего космоса.
Конструкция, близкая к человеческой руке
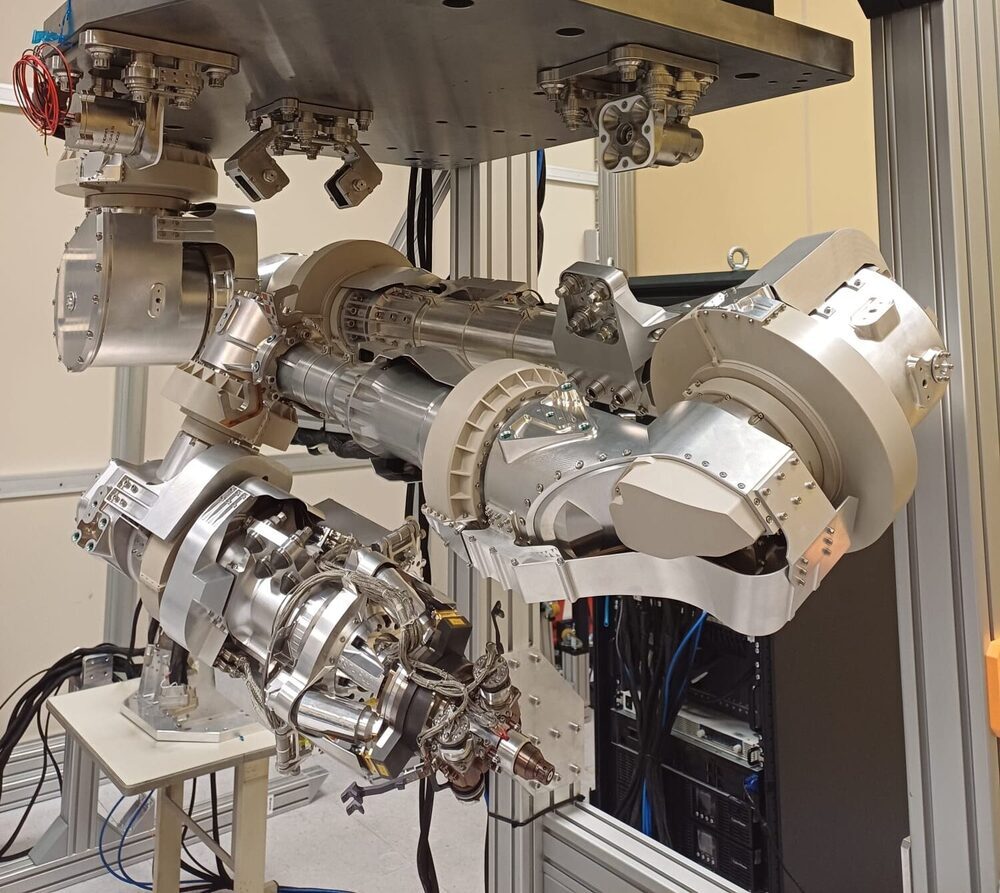
STA построена по анатомическому принципу: плечевой, локтевой и запястный сегменты обеспечивают семь степеней свободы. Рука может вытягиваться на расстояние до 2,4 метра. На конце установлен захват, рассчитанный на работу с точностью до миллиметра.
Система оснащена камерами и набором датчиков, которые позволяют ей ориентироваться в среде и выполнять операции без постоянного участия оператора.
Осязание и автономное управление
Ключевой элемент — датчики силы и крутящего момента. Они фиксируют нагрузку при контакте с объектами и фактически заменяют осязание. Это важно при работе с хрупкими геологическими образцами.
Положение каждого сустава непрерывно отслеживается, что позволяет точно вычислять положение захвата в пространстве. Отдельный электронный блок управляет всей системой, а бортовые камеры обеспечивают визуальную обратную связь.
Изначально STA создавалась в рамках программы Mars Sample Return — совместного проекта НАСА и ESA по доставке на Землю образцов, собранных марсоходом Perseverance rover.
Несмотря на неопределенность дальнейшей судьбы миссии, технология рассматривается шире — как универсальный инструмент для лунных экспедиций и автономных операций на поверхности других планет.
Человеческий фактор и опыт работы в космосе
Развитие подобных систем связано не только с инженерией, но и с тем, как человек взаимодействует с космосом. Итальянский астронавт Лука Пармитано вспоминал, что впервые обратил внимание на психологическую сторону подготовки на Байконуре в 2012 году. Тогда, будучи дублером экипажа, он заметил, что космонавты перед стартом выглядят спокойно, почти обыденно. Позже, уже перед собственным полетом, он понял, что сам находится в таком же состоянии. В дальнейшем Пармитано столкнулся с одним из самых опасных эпизодов внекорабельной деятельности, когда во время выхода в открытый космос его скафандр начал заполняться водой и операцию пришлось экстренно прервать.
Этот опыт хорошо иллюстрирует ограниченность человека в открытой среде и объясняет интерес к роботизированным системам, которые могут снижать риски прямого участия.
Испытания и сборка в Европе
Сейчас интеграция STA завершается на площадке компании Leonardo в Нервьяно (Италия). В ближайшее время начнутся испытания в условиях, имитирующих космос.
В проект вовлечен европейский консорциум с участием компаний из Испании, Швейцарии, Франции, Румынии, Дании, Греции и Германии. В конструкции используются гибкое «запястье» для мягкого контакта, плоские кабельные жгуты с сотнями линий связи и усиленная механика, рассчитанная на нагрузки запуска.
Чем STA отличается от существующих манипуляторов
Роботизированные руки уже применяются на орбите, например на МКС. Однако STA отличается сочетанием трех характеристик:
- более высокий уровень автономности
- развитая сенсорная система, позволяющая «чувствовать» силу контакта с объектами
- ориентация на научные операции с образцами, а не только обслуживание систем
По сути, это попытка создать инструмент, способный работать в условиях задержек связи и частично заменять участие человека там, где его присутствие слишком рискованно или невозможно.









