Инженеры создали роботизированную руку ловчее человеческой: видео
Инженеры Федеральной политехнической школы Лозанны (EPFL, Швейцария) разработали роботизированную руку, которая может выполнять манипуляции, недоступные обычной человеческой кисти. На протяжении веков человеческая рука считалась эталоном ловкости. Она способна захватывать, щипать и удерживать предметы, но ее возможности ограничены: пальцы сгибаются только к ладони, большой палец один, а одновременное выполнение нескольких задач затруднительно. Результаты опубликованы журнале Nature Communications.
«Мы видим ограничения человеческой руки, когда пытаемся достать предметы из-под мебели или одновременно держим бутылку и берем банку», — объясняет Оуд Биллард, руководитель Лаборатории алгоритмов и систем обучения (LASA) в EPFL.
6 пальцев вместо 5
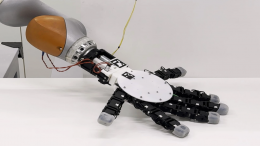
Роборука оснащена шестью гибкими пальцами с силиконовыми наконечниками. Симметричная архитектура позволяет любому пальцу выполнять функции захвата большим. Два крайних пальца могут перемещаться, формируя противопоставленные большие пальцы на обоих концах кисти. Таким образом, каждая рука имеет два больших пальца, что значительно расширяет диапазон захватов. Симметрия также устраняет ограничения «ладони» и «тыльной стороны» — пальцы могут сгибаться наружу и назад.
Благодаря этой конструкции рука может удерживать предметы на спине, манипулировать несколькими объектами одновременно и изменять способ захвата без перестановки всей кисти. Она может выполнять 33 типа движений захвата, традиционно свойственных человеку, и одновременно использовать инструменты, удерживая другие предметы.
Вдохновение из природы
«Многие организмы эволюционировали, создавая универсальные конечности для разных функций», — поясняет Биллард. Например, осьминог использует щупальца для ползания и вскрытия раковин, богомол сочетает захват и передвижение с охотой. Роборука EPFL заимствует эти принципы, объединяя автономность, гибкость и точность.
Кисть может отсоединяться от основной руки и передвигаться самостоятельно, управляя каждым пальцем отдельно. Это позволяет руке «ползать», добираясь до объектов, недоступных основной конструкции, закреплять предметы на своей спине и одновременно выполнять манипуляции инструментами. Комбинация симметрии, независимого управления пальцами и мобильности обеспечивает возможности, существенно превышающие человеческие.
Применение на практике
Рука может повысить эффективность там, где требуется высокая точность и гибкость: хирургия, сборка сложных механизмов, работы в ограниченных или опасных пространствах. Она способна одновременно удерживать, извлекать и использовать несколько инструментов, что ускоряет процессы и снижает риск ошибок.
Например, в медицине такая кисть может ускорить сложные операции, в промышленности — выполнять деликатные сборочные операции, а в военной сфере — обезвреживать взрывные устройства или извлекать объекты из труднодоступных мест. Возможность одновременной работы с несколькими объектами открывает новые горизонты для роботизированной автоматизации.
Будущее протезирования
Хотя рука пока не предназначена как протез для людей, ее технологии можно адаптировать для медицинских целей. Как отмечают инженеры, ее симметричная и автономная конструкция открывает перспективы для расширения возможностей протезов и интерактивных роботизированных систем.