























Создана трехпалая роботизированная рука с ногтями для точного захвата

Ученые разработали трехпалую роботизированную руку, кончики пальцев которой сочетают мягкий материал и жесткий «ноготь». Такая конструкция позволяет аккуратно захватывать предметы, открывать контейнеры и поднимать плоские объекты. Результаты исследования опубликованы на сервере arXiv. Эксперименты показывают, какие бытовые и промышленные задачи могут выполнять такие роботизированные системы.
Новый подход к захвату предметов
Большинство стандартных роботов используют пальцы с мягкой подушечкой на жесткой основе. В результате кончик становится квадратным, что хорошо работает только при прямых нагрузках. В новой модели мягкий материал оборачивает внутренний «скелет» пальца, а сверху закреплен жесткий слой, формирующий овальный кончик, похожий на человеческий.
«Квадратная форма хорошо адаптируется только к силам, действующим прямо, но наша конструкция может гибко реагировать на скручивающие и боковые нагрузки», — объясняет инженер Донг Хо Кан из Техасского университета в Остине.
У людей жесткие ногти выполняют похожую функцию: они укрепляют мягкие кончики, концентрируя давление и позволяя точнее захватывать объекты. Роботизированные «ногти» решают ту же задачу — увеличивают упругость и силу захвата.
Проверка на практике
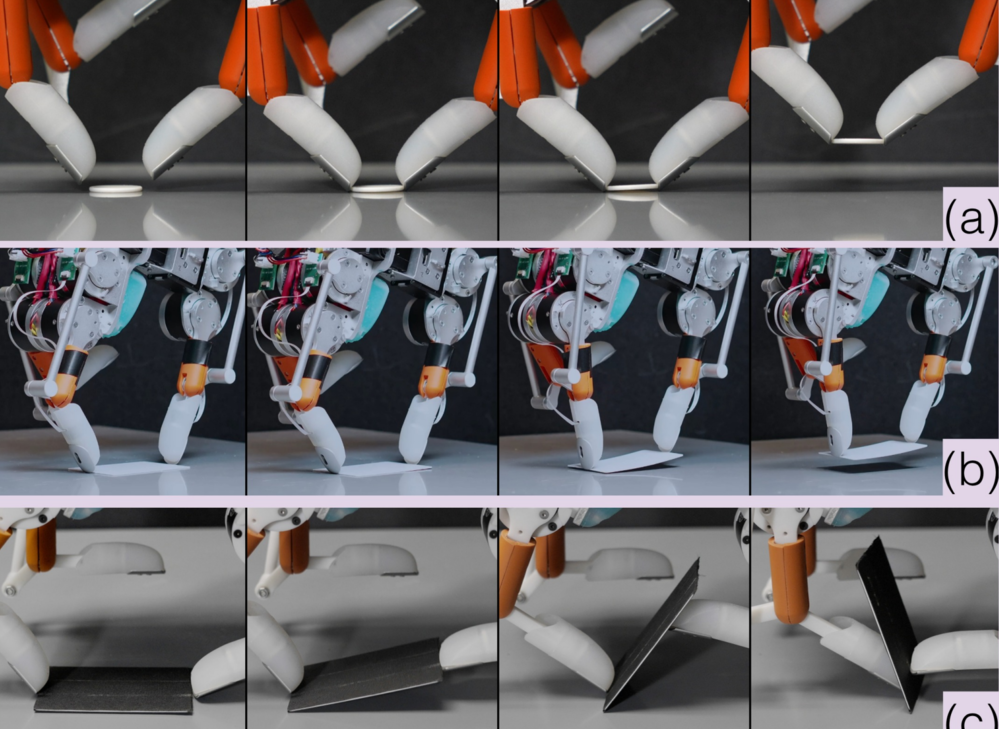
Исследователи протестировали руку с тремя пальцами — большим, указательным и средним — с ногтями и без. Пальцы пытались захватить плоские предметы, объекты с выпуклой поверхностью и изогнутые внутрь. Кончики с ногтями удерживали предметы надежнее и справлялись с изогнутыми формами, тогда как без них мягкие пальцы легко деформировались и теряли устойчивость.

Рука с «ногтями» также смогла вытаскивать отдельные листы бумаги из стопки, поднимать монеты и карты с плоской поверхности, переворачивать карты и открывать крышки контейнеров. Мягкие кончики без жесткой верхушки в этих задачах справлялись хуже или не могли захватить края предметов.
«Эти испытания показывают потенциал конструкции для точных и деликатных операций, которые требуются в промышленных и бытовых условиях», — отмечает Кан.
Следующим шагом исследователи планируют создать полноценную роботизированную руку на основе этой технологии.
Новая конструкция объединяет гибкость и точность, вдохновляясь человеческими руками. Это открывает возможности для роботов, способных выполнять сложные манипуляции, ранее доступные только человеку. По словам Кан, такие разработки могут применяться в логистике, обслуживании, медицинских роботах и работе с хрупкими или мелкими объектами.




