




















В США разработали робота-червяка


Исследователи из Калифорнийского университета в Санта-Барбаре и Технологического института Джорджии (США) разработали робота для изучения подземного мира и передвижения под землей.
Исследование опубликовано в журнале Science Robotics, коротко о нем рассказывает Science Daily.
Мы видели, как роботы поднимаются в воздух, ныряют под воду и выполняют всевозможные маневры на суше. Теперь разработчики исследуют новый рубеж — землю под нашими ногами. Американские ученые разработали управляемого мягкого робота, который может прорываться сквозь песок. Эта технология не только открывает новые возможности для быстрого и точного передвижения под землей, но также закладывает механическую основу для новых типов роботов.
В то время как воздух и вода оказывают небольшое сопротивление движущимся сквозь них объектам, подземный мир — это совсем другая история. Чтобы продвинуться под землей, нужно отодвинуть почву или песок в сторону.
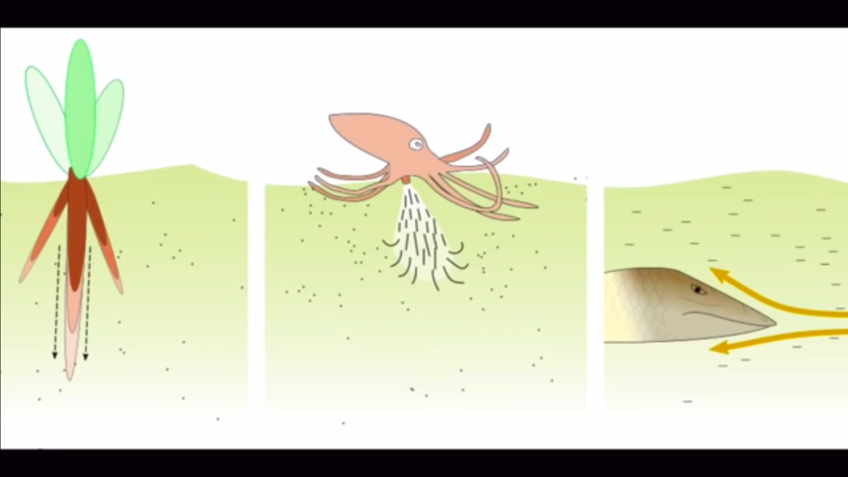
Мир природы предоставляет множество примеров подземной навигации: растения и грибы строят подземные сети, а животные овладели способностью прорывать туннели в гранулированной среде.
Исследователи взяли за основу мягкого робота, похожего на виноградную лозу, который имитирует растения и их манеру передвижения — удлиняет кончики, в то время как остальная часть тела остается неподвижной. В подземных условиях такой способ движения сохраняет низкий уровень трения. Если бы все тело двигалось по мере роста, трение увеличивалось бы по всей поверхности.
Между тем подземные животные подсказали разработчикам еще одну стратегию — псевдоожижение, которое переводит частицы в жидкое состояние и позволяет животному преодолевать высокий уровень сопротивления, создаваемый песком или рыхлой почвой. Южный песчаный осьминог, например, выбрасывает струю воды в землю и затем зарывается во временно разрыхленный песок. Такую же способность получил и новый робот: на его растущем конце есть устройство, которое стреляет воздухом в почву перед роботом.
«Самая большая проблема, которую мы обнаружили и на решение которой потребовалось больше всего времени, заключалась в том, что, когда мы перешли на горизонтальное копание, наши роботы всегда всплывали на поверхность», — рассказали ученые. В то время как газы или жидкости равномерно текут над и под движущимся симметричным объектом, в псевдоожиженном песке распределение сил не так сбалансировано и создает значительную подъемную силу для горизонтально перемещающегося робота. Ученые нашли способ отрегулировать угол потока воздуха так, что воздух уменьшает подъемную силу и выкапывает песок под растущим концом робота.
Маленький исследовательский мягкий робот имеет множество применений, где требуется неглубокое рытье нор через сухую гранулированную среду: например, отбор проб почвы, подземный монтаж инженерных сетей и контроль эрозии. Удлинение наконечника позволяет изменять направление, а также регулировать, насколько прочно тело робота закреплено в среде — такой контроль может оказаться полезным для исследований в условиях низкой гравитации.
Команда уже работает над совместным проектом с НАСА по рытью нор на Луне и более далеких спутниках, в частности на Энцеладе, спутнике Юпитера.