Роботизированная рука освоила бережный сбор ягод

Сбор клубники — одна из самых сложных задач в сельском хозяйстве. Ошибка в несколько часов может превратить идеальный урожай в негодный продукт: недозревшие ягоды лишены вкуса, а перезревшие мгновенно мнутся и портятся. Чтобы решить эту проблему, инженеры из Корнеллского университета (США) создали «мягкого» робота, который оценивает спелость плодов не по внешнему виду, а на ощупь. Исследование опубликовали в журнале Nature Communications.
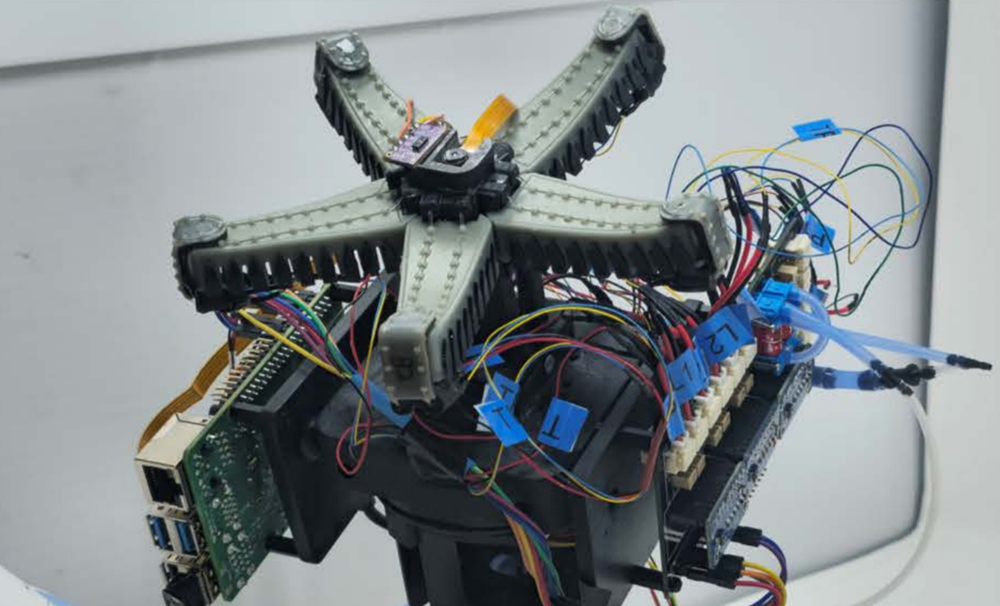
Как робот «чувствует» ягоду
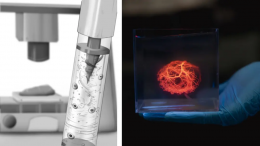
Инженеры использовали гибкие оптические волноводы. Внутри мягких пальцев робота проходят волокна, по которым передается свет. Когда палец сжимается, световой сигнал меняется, позволяя системе с высокой точностью рассчитать силу давления и упругость объекта.
Система работает в два этапа:
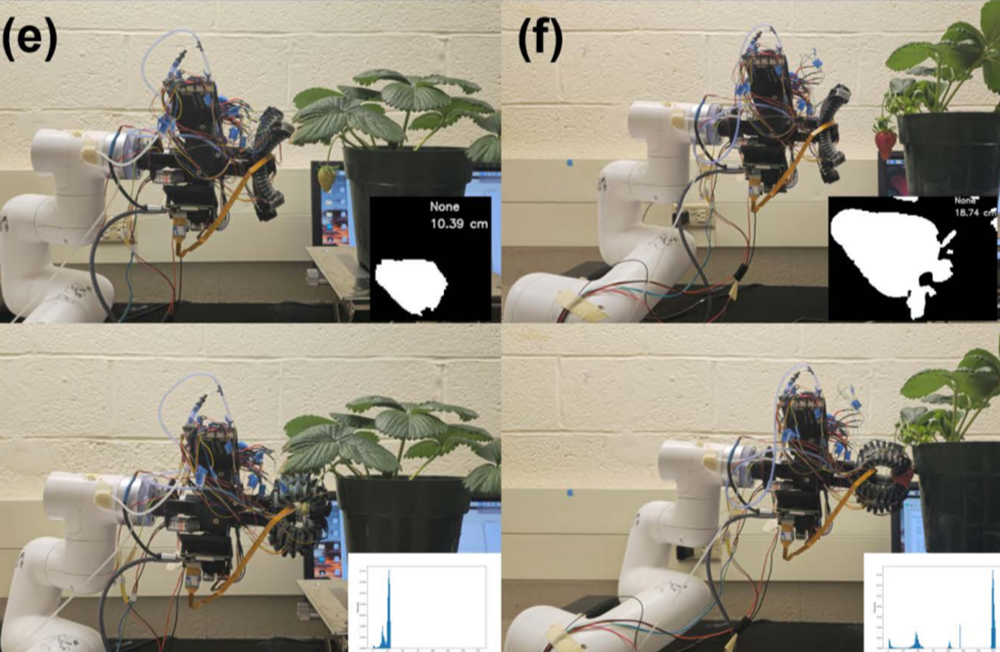
- визуальный поиск — камера в центре ладони находит ягоду по цвету и размеру;
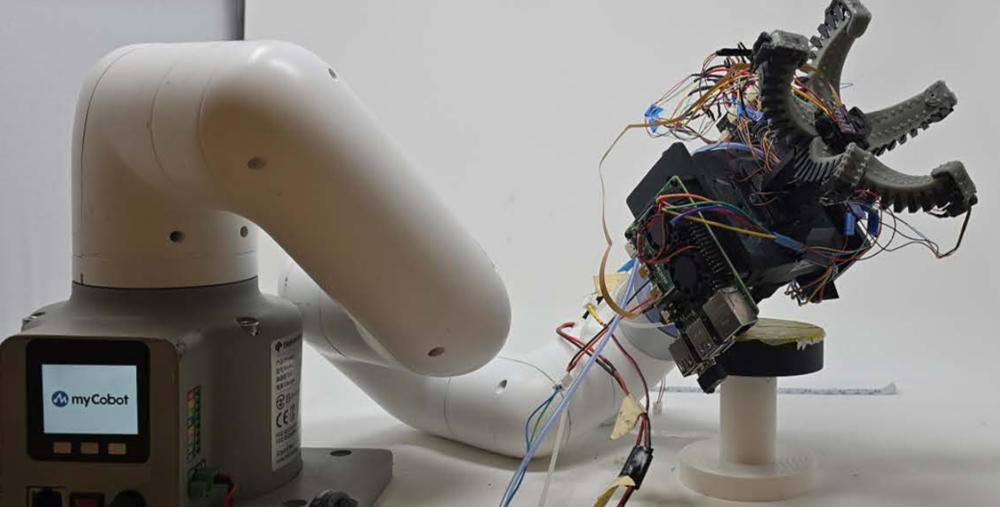
- тактильная проверка — пять мягких пальцев обхватывают плод, и, если датчики фиксируют нужную степень мягкости, робот понимает, что клубника созрела.
Техника бережного скручивания
В отличие от жестких механических захватов, пневматические пальцы робота сгибаются на 240 градусов, буквально обволакивая фрукт. Но самое важное происходит в момент отделения: робот не тянет ягоду вниз, а аккуратно вращает ее. Это движение имитирует профессиональный ручной сбор, позволяя стеблю отделиться с минимальным усилием.
Тестирование новой технологии началось с классической красной клубники, где визуальный контроль позволял легко подтвердить точность тактильных сигналов. Однако настоящим испытанием для роботов станут такие плоды, как авокадо или папайя. Эти фрукты, распространенные в Северной Америке, имеют кремообразную текстуру и могут выглядеть одинаково как в зрелом, так и в недоспелом виде, что делает их визуальную оценку крайне сложной.
В подобных сценариях сенсорная система захвата становится незаменимой. Она улавливает тот тонкий момент, когда плод уже достиг зрелости, но сохранил достаточную упругость для безопасной транспортировки.
Роберт Шепард, соавтор исследования и директор аспирантуры по специальности «Машиностроение» в Корнеллском университете, поясняет специфику работы с такими культурами: «Проблема с папайей в том, что невозможно понять, когда она созрела, а созревает она так быстро, что если вы не успеете вовремя, то просто упустите момент».
Будущее агрокультуры
Развитие компактных и «чувствительных» роботов-сборщиков способно изменить облик современного сельского хозяйства. Технология позволит высаживать разные виды растений на одном поле. Сегодняшние гигантские комбайны требуют строгого единообразия, тогда как гибкие роботы смогут лавировать между разными культурами. Машины смогут подстраиваться под индивидуальный темп созревания каждого отдельного растения. Переход к биологическому разнообразию на полях сделает агросистемы более защищенными и экологичными.
Хотя внедрение таких систем требует пересмотра привычных методов ведения хозяйства, оно открывает путь к созданию умных ферм, где технологии работают в тесном и бережном контакте с природой.
Переход от лабораторных стендов к реальным полям требует от машин значительно более высокой надежности. В естественной фермерской среде роботам приходится ежесезонно противостоять грязи, липкому соку, экстремальной жаре, ливням и постоянной тряске на неровной почве. Текущие прототипы все еще нуждаются в более прочных и защищенных корпусах.
Практические испытания выявили ряд технических уязвимостей:
- Чувствительность датчиков. Открытые оптические волокна начинали искажать сигнал, как только на них попадал сок из перезревших ягод. Это требовало регулярной чистки или даже полной замены элементов.
- Трудности навигации. Точность измерения размеров плодов заметно снижалась, когда бюджетные датчики расстояния сталкивались с меняющимся освещением, игрой теней или неоднородным цветом поверхностей.
Из-за этих факторов робот-сборщик пока остается на экспериментальной стадии и не может в полной мере заменить труд квалифицированных специалистов.
Несмотря на существующие сложности, сама концепция бережного сбора, проверки спелости через касание и аккуратного скручивания плода задает вектор для технологий будущего. Следующим этапом разработок станет адаптация систем к агрессивным сельскохозяйственным условиям.