Космических роботов испытали под землей — видео

Чтобы исследовать вулканические туннели на Луне или Марсе, туда можно отправить команду специализированных роботов. Они уже разработаны и испытаны на испанском острове Лансароте. Отчет о тестировании вышел в журнале Science Robotics.
Проверка концепции столь сложного подземного исследования в реальных полевых условиях стала «значительным шагом на пути к будущим исследованиям лунных и марсианских пещер», — говорит геохимик Дженнифер Бланк из Научного института космических исследований Blue Marble в Калифорнии, которая работала над марсоходом Curiosity.
Вулканические извержения часто оставляют после себя подземные туннели, называемые «лавовыми трубками». Они образуются, когда реки раскаленной лавы текут под остывшим и затвердевшим поверхностным слоем, создавая каналы, которые остаются пустыми после окончания извержения.
Спутниковые исследования обнаружили лавовые трубки под поверхностью Марса и Луны. Эти «подземные» пространства могут стать подходящим местом для развертывания баз в будущих миссиях, так как защитят людей от космических лучей, солнечных бурь и микрометеоритов.
«Это может быть отличным местом для поиска следов жизни, а также для размещения человеческого жилища», — уверен робототехник Карлос Перес-дель-Пульгар из Малагского университета в Испании.
Испытания на Лансароте проходили в четыре этапа. Сначала два ровера составили карту поверхности вокруг входа в подземную пещеру. Затем небольшой кубический зонд, похожий на «кубсат», был сброшен с одного из роверов в пещеру, чтобы создать детальную 3D-карту входа. Роботы использовали ее для планирования оптимального маршрута спуска.
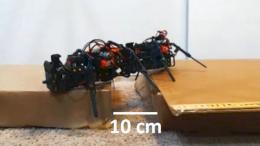
Следующим шагом — по словам Переса-дель-Пульгара, самым сложным — стало автономное выполнение задачи. Меньший из двух роверов прикрепился к большему и начал спускаться в пещеру. Затем отсоединился и проехал 235 метров по неровной поверхности, составляя 3D-карту туннеля.
Главной проблемой исследования больших пещерных систем Перес-дель-Пульгар считает обеспечение радиосвязи роботов с оборудованием на поверхности, поскольку радиоволны не проходят через горные породы.
Отчасти исследователи вдохновлялись конкурсом DARPA Subterranean Challenge 2021, где большинство команд использовали несколько типов роботов — включая роверы, дроны и шагающие машины.
«Подобно командам экспертов-людей с разными навыками, роботы в командах могут дополнять друг друга», — пояснил робототехник Марко Хуттер из Швейцарской высшей технической школы Цюриха.